
自動運転の効果:ヒューマンドライバに代わっての運転
オートメーションの直接の効果は,工場のオートメーションに見られるように,省力化,無人化にある.自動車交通へのオートメーションの導入である自動運転は,ヒューマンドライバが不要の,あるいはヒューマンドライバでは困難なまたは不可能な環境下での運転を可能にする.
まずは長距離走行時の自動運転がある.乗用車,トラック,バスなどの高速道路上での長距離の運転は決して楽な作業ではない.このような場面での運転支援を含む自動運転は,安全や効率だけでなく,利便性,快適性の向上を提供する.特に長距離トラックの自動運転は,現在問題となっているドライバ不足問題の解決に寄与する.
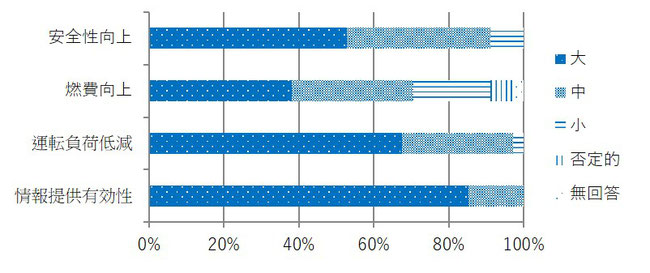
自動運転だけでなくACCやCACCによっても長距離を走行するドライバの運転負荷の低減を図ることができる.エネルギーITSプロジェクトでは4台のトラックのCACCの評価実験をテストコースで行ったが,ドライバによるCACCの評価を図1に示す.この実験では,操舵はヒューマンドライバが行ったが,速度と車間距離の制御は自動制御で行った.安全性の向上,燃費向上,運転負荷低減の各項目について肯定的な評価となっている.評価者は物流事業者5社のドライバ20名と業務管理者9名で4台のトラックは車間距離30m,速度80km/hで走行した.
自動運転は,ヒューマンドライバが運転するのが困難なまたは不可能な悪天候下,たとえば霧中あるいは降積雪時での運転を可能にする.悪天候下での着陸を可能にする航空機のILS(Instrument Landing System,計器着陸システム)に類似している.2000年頃米国ミネソタ州で実験が行われた除雪車の運転支援システムでは降積雪時にレーンマーカの視認性が低下するときの支援システムが開発された.GPSで測定した自車位置と地図データベースに基づいてコンピュータ内で仮想的に生成したレーンマーカをドライバの面前のハーフミラーに投影して仮想レーンマーカを表示した.
プラトゥーン走行時には,車間距離が小さいために,後続車両のヒューマンドライバは道路を見て操舵を行うことが困難または不可能となる.したがって後続車両は横方向と縦方向の両方向の自動運転が必要となる.エネルギーITSプロジェクトでの自動運転トラックの横方向制御では,プラトゥーンの後続車では車両前方の視野が狭くなるために,車体側面に下向きに装着したカメラでトラック側方のレーンマーカを検出した.
路線バスのプレシジョンドッキング(バス停留所のプラットフォームにバスを精密に横付けして,特に車いすや乳母車の乗降を容易にするシステム)や狭いバス専用レーン(米国では路側帯をバス専用レーンとして用いる場合がある)での走行は,ヒューマンドライバにとっては容易ではないため,自動化が必要となる.ドイツやスウェーデンでは既に1980年代に路面に埋設されたケーブルを用いたプレシジョンドッキングが試行されている.カリフォルニアPATHは2000年頃から自動運転バスの開発を進めている.自動運転は,レーン中央に永久磁石列を埋設し,車上の磁気センサで磁界を検出して操舵制御を行う方式で,路車協調型である.この路線バスの自動運転システムは現在米国オレゴン州ユージンで実用化されている.この町のシステムでは,バスは道路の中央分離帯に設けられた専用レーンを走行し,バスドライバは運転席に着座しているが,運転時の負荷が低減されている(自動化レベル2または3).
我が国においてドライバが急病・急死したために発生する事故は,死亡事故の1%ないし2~3%程度をしめているとされている.2016年2月の梅田(大阪)や同年5月の三宮(神戸)での事故が記憶に新しいところである.このようなときに短時間,短距離の自動運転を行って車両を路側などに安全に停止させれば,二次事故の発生を防ぐことが可能となる.鉄道では,運転士が急病・急死時に,自動的にブレーキを動作させることが可能なデッドマン装置が既に使われている.
自動運転は,身体障害者や高齢者の移動手段となりうる.この場合,通常は短距離の移動が主体であるから,車両は1人または2人乗りの小型低速車両で十分で,安全性に対する要件も緩和することができる.ヨーロッパでは1990年代から開発が行われており,図2に2つの例を示す.これらの車両は限定された環境で走行するため,レベル4に分類される.


図2 左:アムステルダムのスキポール空港駐車場内の小型低速車両(1998年撮影)右:フランスの研究機関INRIAで開発中の小型低速車両(2011年撮影)
コメント募集
上記記載内容に対する皆様のコメントを頂ければ幸いです。コメントを記載された後、スパム防止欄、送信ボタンの順でクリック願います。
注意事項
・情報発信されたコメント内容は、本ウェッブサイト管理者が内容確認・承認後、本ウェッブサイトで公開させて頂きます。
・コメントは、以下のフォーマットに従い、名前欄に実名とニックネーム、連絡先メールアドレス、コメントの順に記載し投稿願います。
・コメント公開は、原則ニックネームで行いますが、ご要望があれば実名でも行います。
・頂いたコメントは、管理者の方で適時削除します。
過去のコメントに対する著者からの回答は掲載してあります。
尚、特定の大学の学生さんの個人情報が不適切に扱われておりましたので削除いたしました。お詫びいたします。
コメント投稿
コメントに対する著者からの回答
・乗用車や路線バスの自動運転(狭義)は遠い将来のことと考えている.当面は乗用車や路線バスは高度の運転支援が適切であろう.しかし運転支援にはシステムの過信という大きな課題がある.運転支援のありかたについてはブログのテーマに予定している.
・トラックの隊列走行の先頭車のドライバの責任は,法律や制度上の課題としてとらえるべきと思う.
・インフラストラクチャの保守,更新は重要な課題である.一般に,電子機器の寿命(数年)<自動車の寿命(約10年)<インフラストラクチャの設備の寿命(約20年~)であり,自動車の電子機器の進歩にインフラストラクチャが追いつかない.高速道路のVICS送信機の廃止はその実例である.このような電子機器ではないが,カリフォルニアPATHの磁石については,1997年のデモで使用した後,2003年のデモでも使用して動作を確認した.また1997年のデモでは,道路に埋設した磁石の磁界の強さの測定や極性を検査する自動運転車を走らせている.
・自動車用デッドマン装置はレベル3に位置づけられようが,技術的にはドライバの異常の検出技術や自動車を路肩などに安全に停止させる技術など,困難な点がある.導入は車体価格が高価な高速バスから始まるのではないか.
・自動運転の研究に関して我が国は欧米に先行した面があるが,実用化を目指した開発に関しては欧米を追いかけることになった.その一因は,我が国の道路交通の法律,制度と自動車会社のビジネスにあるのではないか.
・ヒューマンドライバ以上の安全を実現するために自動運転に要求される信頼性については「自動運転の信頼性」を参照されたい.
・CACCは,協調システムで述べる予定であるため,ここでは簡単に説明する.CACCには車車間通信が必須であるが,自家用乗用車が車車間通信を装備することは,「鶏と卵」問題のために非常に困難である.したがって相前後する乗用車が車車間通信装置を装備してCACCを行うことはまず実現しないといっていい.見知らぬ相手から車両制御のための情報をもらうだろうか,というドライバの受容性の点からも乗用車のCACCは疑問である.CACCはむしろ高速道路を走行する長距離トラックや隊列で走行する観光バスに適している.トラックやバスでは,車車間通信装置の装備は経営者や業界の判断で行うことができ,安全や効率の観点で効果があるからである.さらにCACCにはACCとともに縦方向制御(速度と車間距離の制御)に関して課題がある.各車両で制御アルゴリズムが異なっていると先行車の速度の変動が後続車に増幅されて伝搬し,後続車はブレーキをかけて停止せざるを得なくなる可能性がある.
2018年1月25日